【Case Study】Overcoming the Challenges of 3D Mapping for Autonomous Cars
The ECX-2400 PEG is built on a workstation-grade 10th Gen Intel® Xeon®/Core™ i9-10900E processor (CML) AI computing system with NVIDIA® Tesla®/Quadro®/GeForce® graphics. The i9-10900E uses the Intel W480E chipset with a 10-core CPU to support high-performance computing and multiple 5G/Wi-Fi 6/4G/3G/LTE/GPRS/UMTS interfaces for high-speed wireless data transfer. The 10-core processor easily handles 20 computing threads, supporting real-time live video capture from multiple sources at the same time as 3D mapping model setup and SLAM processing.

The Challenge of Building 3D Maps / JAPAN
One of the reasons 3D mapping is useful to autonomous vehicles is because it offloads the need for the vehicle to build its own map in real-time. Building 3D maps is extremely compute-intensive, and using pre-built 3D maps effectively offloads this task from the autonomous vehicle. When a 3D map is available, the vehicle can focus on identifying and tracking objects within the environment rather than having to first scope out the environment so it can then identify objects within the environment.
Building a 3D map requires that a mapping vehicle drive through the area to map and capture data critical for autonomous vehicles. The raw video data will then be processed into a format that is easier for the ADAS to utilize.
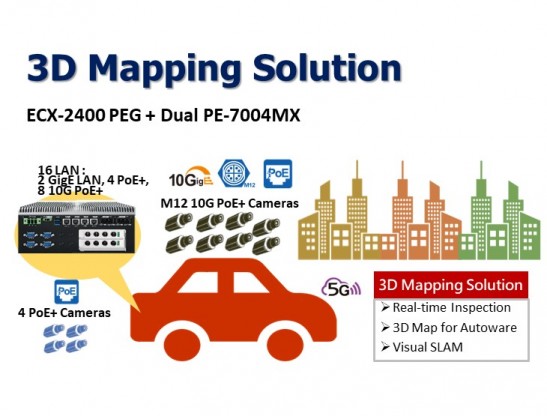
A Japanese software startup approached Vecow to build a 3D mapping system to support a wide range of autonomous vehicle applications, including self-driving cars, ADAS for passenger cars, golf carts, AMR, AGV, and drones. Vecow worked with the software company to build a custom real-time computing system that would provide the capabilities they needed to overcome the challenges associated with 3D map capture. The result is the ECX-2400 PEG + Dual PE-7004MX.
About this case study, please copy-paste this link into the address and go. → https://bit.ly/3BN7XPj